ライチ(Litchi for DJI)利用する

以前 忘れもしない太陽光パネルの点検のための見積もりをしたところ
うちの半額ぐらいを提示してきたところがあった。
そちらは岡山からの交通費もあったので、その分とこちらも値引きしてなんとかとれた。
点検はPVの空撮などと異なり作業の効率化が大事だ。おそらくその業者はうちの半分の時間でやれるはず。
そして、その時はスクラッチで飛行させたので、まったく割に合う業務ではなかった。ただネタとして取る必要があった。
太陽光パネルの点検業務ということで実績ができる。そのネタが書ける。
だが
これを割に合う業務にし、さらに効率化を図るためには自動飛行 自動撮影は急務だと思われる。空撮だけで食えるとは考えていない。点検業務は最低でもできなきゃ。
そこで久々にライチ(Litchi for DJI)を利用することにする。その前にMavic2のウェイポイントも確認済み、精細なエリアのウェイポイントが打ち込めない。たびたびリセットが入る。Mavic3も使用可能だが狭小エリアを考えた場合にプロペラガードが無い。
当然ながら久々なのでリハーサルを行う。本番に近い形を想定してリハーサルを行う。

[ウェイポイント]
・2棟の雨どいを点検する。その2棟は高さが10m違う。10mと20m
・利用する機能はウェイポイント ストレートライン カメラの向きは真下
[通常考えるべきチェックポイント]
・暑さ対策 人間:水冷服>バッテリー 保冷剤 補充用の水
・暑さ対策 機材:タブレット暴走(テスト中に一時的に発生)>保冷剤
・狭小エリア Mavic2のプロペラガード DJI neoでの飛行
・ウェイポイントが使えなかった場合のためにMavic3
[確認できないこと]
・電波障害の有無 もっとも電波障害に強いとされるMavic2のoccusinc2を採用する。本番開始時に一番に確認する。不具合が起きるようであれば中止若しくは別日に延期も相談する。
リハーサル
当初パソコン上でウェイポイント設定を行い、現地にてボタンを押すだけと考えていたが、タブレットに表示されるマップとカメラに映し出される映像のずれは数メートルなのでそのやり方が使えないことが分かった。というよりも直近で採用した方法がそれ以外の方法だったので以前からわかっていたこと。
それ以外の方法とは
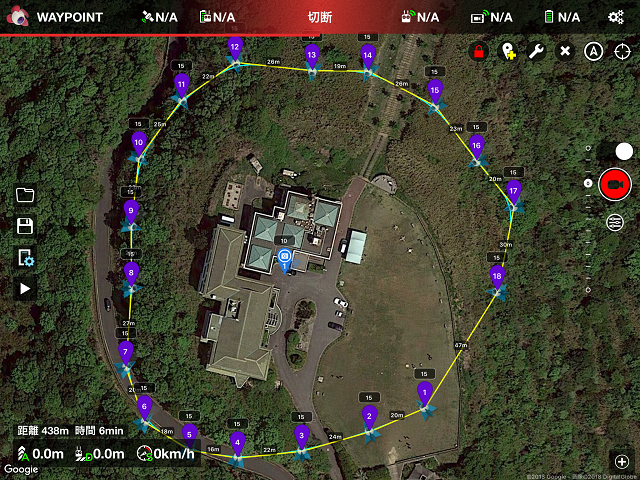
ウェイポイントモードにして想定コースをモニターで確認しながら飛行し、ウェイポイント(中間地点)を打ち込む。
すべて打ち込むとミッションハブに送信、保存する。そのミッションを実行することで業務を行う。恐らく今後もこれ以外の方法はない。
・ウェイポイントを打ち込みミッションスタートした後、障害物手前でミッションストップ [障害物センサーオフにする。ビジョンセンサーも同じくここでプロペラガードは必須になる。巡航速度も最低の1m(早いと衝突の衝撃で墜落する可能性がある)建物に近づいた際に前方センサーが反応するかを確認 。反応しなければ障害物センサーはオン]
・ストレートラインだがウェイポイントごとに機体の向きを変えるとミッションの間で向きを変えるために写真の画角がばらばら。ミッションの間で向きを変える挙動はデフォルトの為対応不可能[向きを変えるためのウェイポイントを余分に打ち込むただしウェイポイント間は1m以上空けないとエラー 高さか余裕を持ったコース設定]
豊富な調査・点検実績 実績をもっと
- 🏠【事例紹介】不動産会社からの屋根点検撮影を実施しました
 📌 依頼の背景 香川県高松市を拠点に活動する不動産会社様より、物件の屋根状態を確認するための空撮点検のご依頼をいただきました。築年数が経過した店舗で、修繕前の状態確認と修繕を行うための資料作成を目的とした撮影です。 🚁 […]
📌 依頼の背景 香川県高松市を拠点に活動する不動産会社様より、物件の屋根状態を確認するための空撮点検のご依頼をいただきました。築年数が経過した店舗で、修繕前の状態確認と修繕を行うための資料作成を目的とした撮影です。 🚁 […] - ライチ(Litchi for DJI)利用する
 以前 忘れもしない太陽光パネルの点検のための見積もりをしたところ うちの半額ぐらいを提示してきたところがあった。 そちらは岡山からの交通費もあったので、その分とこちらも値引きしてなんとかとれた。 点検はPVの空撮などと異 […]
以前 忘れもしない太陽光パネルの点検のための見積もりをしたところ うちの半額ぐらいを提示してきたところがあった。 そちらは岡山からの交通費もあったので、その分とこちらも値引きしてなんとかとれた。 点検はPVの空撮などと異 […] - ドローンで点検業務 太陽光パネルを空撮ドローンで
 県下の大学で空撮をしていないのは残るは・・・四国学院大学のみか。大物は終わってますからねー高松大学徳島文理大学香川大学に引き続き香川県立保健医療大学の空撮行ってきました。といっても太陽光パネルがメインですが。 どうやら工 […]
県下の大学で空撮をしていないのは残るは・・・四国学院大学のみか。大物は終わってますからねー高松大学徳島文理大学香川大学に引き続き香川県立保健医療大学の空撮行ってきました。といっても太陽光パネルがメインですが。 どうやら工 […]
Follow me!

