【Litchi】コースだけを確定させて、撮影中は機首、チルトだけを操作する
どのようなケースの場合に必要か。まさにDID地区がすぐ傍にある場合

このようなケース右側の大学の撮影(赤色のライン上を飛ぶ)のは簡単なように見えて、実は(私には)難しい。
撮影しながら飛行するので、FPVと目視を繰り返しながら飛ぶ
そうすると、どうしても被写体(大学)により過ぎたり(そばには電線)
離れすぎたり
つまりは正確に飛べていない。
そこで、
コース・高さを事前に設定し(waypointを設定)その飛行中は、機首、チルトジンバルを自在に操作可能
としたい。
その方法として考えられるのは、
(これ某大学の空撮依頼を請けての実施についての反省なわけです。業務自体は無事に終わりましたが、どうもしっくりこない結果だったわけで)
「既定ジンバルピッチモード」を「無効」(自在に操作する)
「機首モード (方位)」・・・飛行中の機首の向きを設定します。「ユーザー制御」(マニュアル)・・・送信機でいつでも自由に機首方向を制御できます。

向けられた方位を維持します。方位とは進行方向に関係なく、例えば常に南の方を向いて飛行します。
無事に成功しました。想定どおりの動きで満足です。
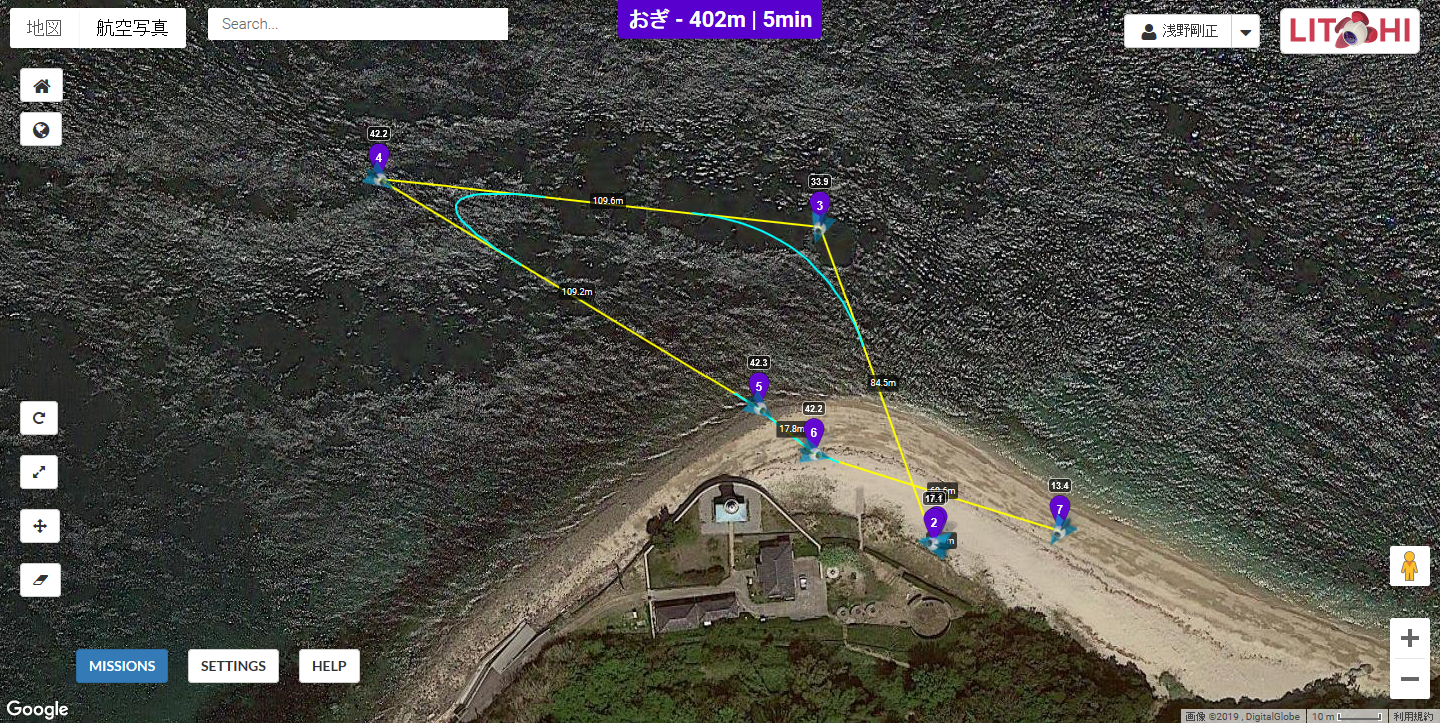
男木島 灯台空撮にて使いました。
さらに追記すると、これを繰り返し飛び、上手くカメラ操作できたほうを採用するという運用が可能
が、しかし、さらなる問題が・・・移動する物体に対してはどうするか。進水式とか
巡航スピードを可変にする。つまりは一時停止し、エレベータ(モード2の右スティック 上下)で速度を自由にコントロールがベターではないかと。てことで、この方法はこれまでにやってきているのですけど、いちおう練習をしてみる。
(ミッション中にエレベータ操作で最大巡航速度まで上がる)

完成動画
Follow me!

