Litchによるドローンの自動操縦(waypoint) ミッション作成フローについて
はじめまして、香川ドローンワークスの浅野です。師匠である岡田代表からの・・・どっかの政党みたいですね・・・ご依頼で拙文を提供させて頂きます。
お題はDJIドローンで自動操縦(Waypoint)を実現するためのツール DJI GOとLitchi(ライチもしくはリッチ、多分イラストからしてリッチ)についてです。あ、まず最初に断っておくと私の機体は、ふるーいPhantom3 Professionalになります。なんせ新品は高いので、貧乏人にはこれで。だからDJI GOになります。DJI GO4でも同じだと思います。多分。
さて自動操縦(ウェイポイント waypoint)について
ごちゃごちゃ書くよりこのサイトでLitchiのことはほとんどわかる
わたしが使って、こまったところわかりにくいところに集中して、ここでは書こうと思います。
3年後やっと業務で使いました
https://abdra.kagoyacloud.com/info/regzam-hall/
いまのドローン空撮(特に動画が、撮り直しが多くて)における問題点悩みはなにか
どうも機体のコントロールと撮影のバランスがうまくいかない。できればもうひとりコントロール役、撮影役がいればうまくバランスが取れいい映像が撮れるのに。だが、いたとしても2オペが可能な高価な機体が必要になる。Inspire以上。ドローンあるあるで言うと、どうしてもタブレット見っぱなし(補助者がいても)ができず、つい機体を見てしまう。そのときに対象物へのフォーカスがずれてしまう。
そうだ!自動操縦(ウェイポイント waypoint)でコントロール役をタブレットにやらせばいい!
つまり自動操縦(ウェイポイント waypoint)で、なにを実現したいかというと
撮影に集中し、少ないフライト数でカットを撮りたい。撮影に集中し、機体コントロールは自動操縦にまかせたい。
まずはDJI GOで試してみる
ためして分かったことは
長所
・中間点に実際に機体を飛ばして設定するので直感的な設定が出来るともいえる。
・DJI GOなので撮影動画の確認がすぐできる
短所
・実際に飛ばなければ設定できないともいえる
・5m以内の中間点の設定が出来ない
・機首のコントロールをフリーにしても撮影のコントロールが難しい
・wifiで飛ばすPhantom3 standardだとしょっちゅうwifiが切れるので、設定しなおししなければならなくなる。これは実際運用時致命的でした。
つぎにLitchiで試してみる
初Litchiです。本来の目的は機体コントロールの負荷を減らし、撮影に集中することでしたが、これはその手間もありません。航路を設定すればあとは録画ボタンを押すだけです。
(ですが、撮影した動画がすぐ確認できない(やりかたがわからない)。解決!設定メニューからキャッシュ動画オンです。)

(撮影中に速度を変える方法がわからない。解決!waypoint実行中に機体を一時停止し)
(C1C2キーに割り当てると便利)

エレベータ操作で、自由に速度コントロールが出来るようになります。
今後の課題として
山などは高度との関係でどのような挙動をするのかも検証が必要です(2018 10/22現在、地面からの高度設定が可能)。
コンパスキャリブレーションについて、Litchiの場合のコンパスキャリブレーションはこの設定にある

のですがテストではうまくいきませんでした。なぜ上手くいかないか検証が必要です。
さて実際にチャレンジしてみました。
「Litchi ウェイポイントによる自動操縦にチャレンジしてみました。
カメラはまったく動かしてみません。ポイントは建物10mだったと記憶してます。
巡航速度は注意しないと、速すぎたり、スタート地点に戻るときなどは急降下で恐怖です。」
いきなり、ミッションを作成>登録>実行としているが
試しに飛んで、肝心な場所にウェイポイントをひとつづつ打ち込み(C1)、ポイントオブインタレストはC2で最後に画面で編集するという方法を試してみたい。
(C1C2キーに割り当てると便利)
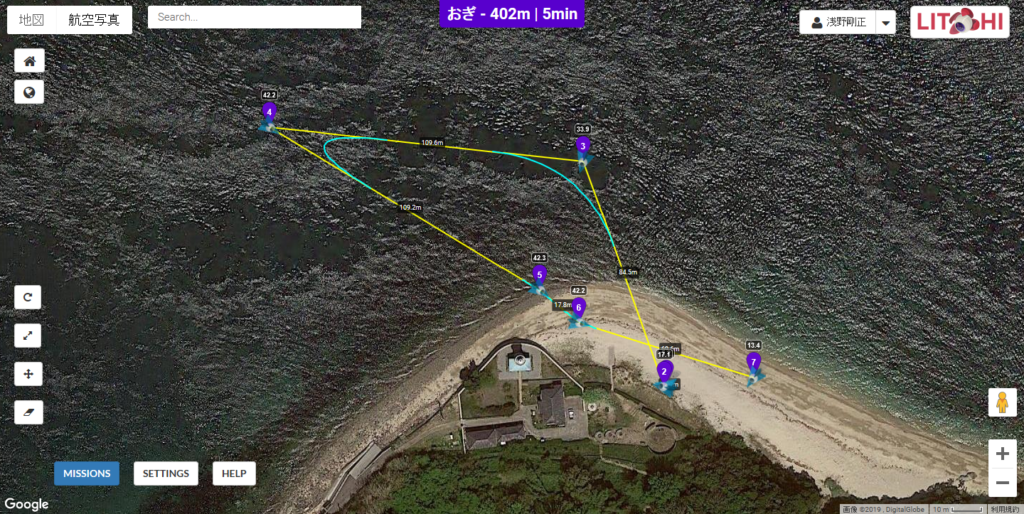
これは、どのような作成フローがベストだろうか。
Ⅰ ①パソコン)ミッションを作成する ②タブレット)ミッションを実行する ③空撮動画を見てミッションを修正しアップする
以降②③の繰り返し
上記動画の場合だと、後半で建物に近づきすぎているので、その部分のwaypointを建物から遠ざける
③においていちいちSDカードを取り出し動画をタブレットに落とし確認するのは面倒なので、設定で動画をキャッシュする設定にしておく。この部分はまだ未検証(負荷が係るので、タブレットが遅くなるらしい)。解決です!設定メニューからキャッシュ動画オンです。
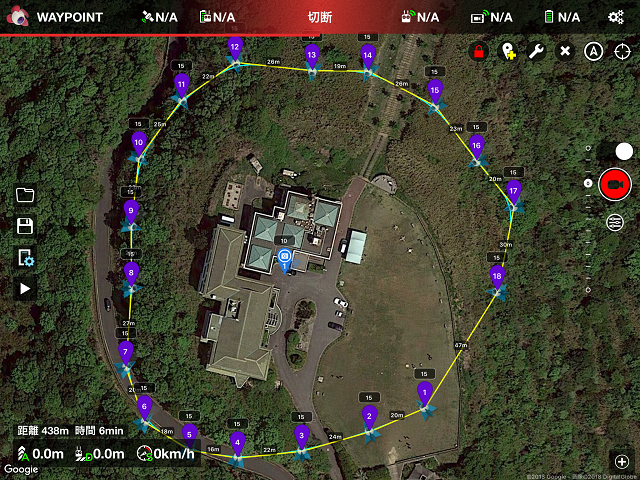
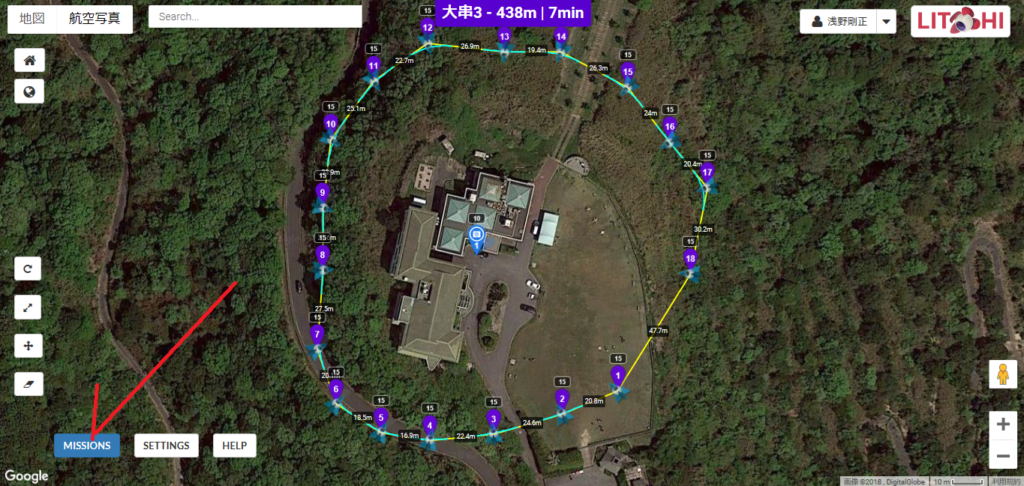
Ⅱ ①実際に飛行させて最適なポジションでwaypointをうっていきミッションを作成する。検証しました。撮りたいアングルの場所でwaypointをうちます。
送信機裏側の 左側C1 右側C2キーにwaypointを打つためのキーを設定
②ミッションを実行する③空撮動画を見てミッションを修正しアップする
以降②③の繰り返し
より直感的なのはこちらだろうと思われる。うまくいけば工数も少なくてすむ
番外編
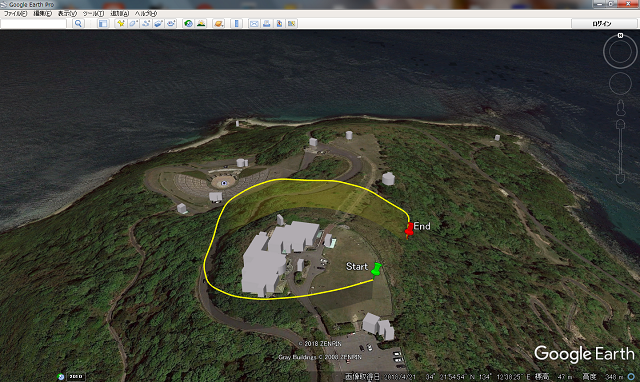
パソコンで作成したミッションをGoogle Earthでシュミレーションすることも出来る
これは
①パソコンにGoogle Earthをインストールする
ミッションをExport As KML3D Pathで出力
出来上がったファイルをダブルクリックするとGoogle Earthで表示されます。
Follow me!
One thought on “Litchによるドローンの自動操縦(waypoint) ミッション作成フローについて”